简介
这款双分辨度3D ToF深度相机搭载了分辨率为 640*480的 ToF图像传感器,利用 ToF 技术获取物体和空间的三维信息,测量距离高达5米,平均功耗仅为1.2W,为用户提供便捷高效的 3D 感知能力。
该传感器小巧轻便,兼容Linux/Windows/ROS/Android多种操作系统,通过 Type C 接口供电并输出相位信息。用户可通过SDK获取depth、point cloud 等数据。它广泛应用于机器人SLAM、体积测量、活体检测、体感互动、3D建模、安防监控/人数统计等场景。
相比于3D结构光相机,ToF深度相机具有许多优势。例如,它的盲区小,测量误差呈线性关系,不受距离近远、场景纹理丰富程度的影响,且成像速度较快,抗环境能力较强。市面上的ToF深度相机的深度分辨率较低,在捕捉深度信息不精细,且价格相对较高。而这款除了表现出色的3D成像能力外,能够实现毫米级的测量精度,性价比也高。
3D TOF相机与普通相机(2D)相比有什么区别呢?
3D TOF相机,也被称为深度相机,是通过它可以检测空间的景深距离,这也是与普通相机最大的区别。普通彩色相机拍摄的图片可以看到摄像头视野内的所有物体并记录下来,但记录下来的数据并不包括这些物体距离摄像头的距离。我们只能通过图像的语义分析来判断哪些物体离我们更远,哪些更近,但没有确切的数据。而3D TOF相机正是解决了这个问题。通过3D TOF相机获取的数据,我们可以准确地知道图像中每个点距离摄像头的距离,可得到图像中每个点的三维空间坐标。通过三维坐标可以还原真实场景,实现场景建模等应用。
特性
- 可达毫米级测量精度
- 典型测量范围:0.1-5 米@室内白墙
- 分辨率:640*480
- 高动态测量范围
- 支持深度、信号幅度时序同步
- 可调整量程和帧率
- 适用场景
- 机器人 SLAM
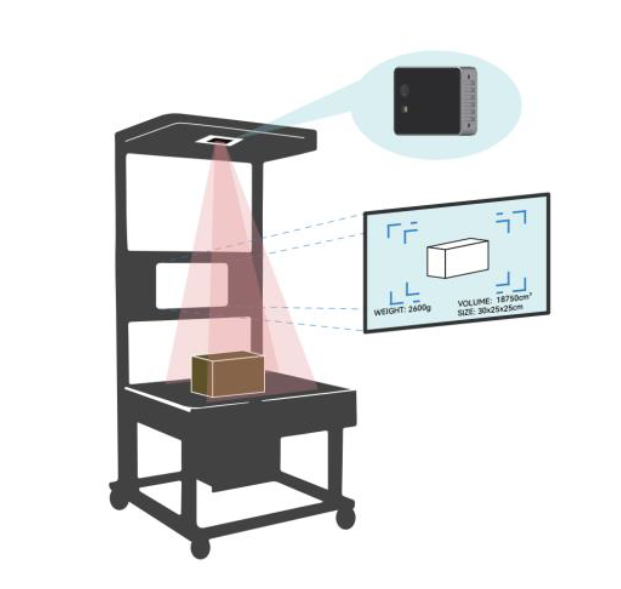
- 体积测量
- 活体检测
- 体感互动
- 3D 建模
- 安防监控/人数统计
技术规格
- 型号:CS20
- Depth分辨率:640x480/320x240
- 量程范围:0.1-5m, 室内
- VCSEL 波长:940nm
- 精度:1% @白墙
- FOV :H60° x V45°(Receiver)
- 尺寸:48mm x 34mm x 12mm
- 数据传输:USB 2.0 ,Type C Interface
- 供电方式:5V, 0.5A
- 功耗平均功耗:1.2W
- 操作系统:Linux/Windows/ROS/Android
- 工作温度:-10 ~ 50℃
- 安全性:Class 1
配送清单
documentstart
相关文档
产品维库
documentsend















 沪公网安备31011502402448
沪公网安备31011502402448