简介
ZL9NSQ是一款集成了三轴加速计、三轴陀螺仪、三轴磁力计的 3D 姿态传感器模块,芯片内部集成32位ARM Cortex-M4F微处理器,采用IMU Motion Engine算法,2.4G无线收发器及封装天线,利用先进的信号处理算法来处理高速采样的内部传感器数据,以提供准确可靠的四元数、欧拉角、校准加速度和校准角速度等精确三维姿态信息。
IMU Motion Engine 软件为一套完整的复合数据融合算法,包含姿态解算、干扰判断、在线校准等算法及数据通讯软件。数据通讯软件统一通讯协议,实现电源管理、参数配置,数据通讯等功能,用户无需编程既可通过调试软件与系统主机通信获取所需的 3D 姿态信息,同时用户亦可通过SDK,使用 Python/C++等编程语言实现与 ZL9NSQ 的数据交换,大幅降低三维姿态应用的开发难度。
ZL9NSQ长时间原地静态运行角度偏移数据在0.05~0.07°左右,精度高,可用于姿态监控、游戏娱乐设备、个人健康和健身、惯性导航以及任何其他需要环境感知的场景。
特性
- 高性能、高精度IMU
- 集成三轴加速计、三轴陀螺仪、三轴磁力计
- 3种通讯方式:RF、UART、SPI
- 可提供四元数、欧拉角、加速度、角速度等三维姿态信息
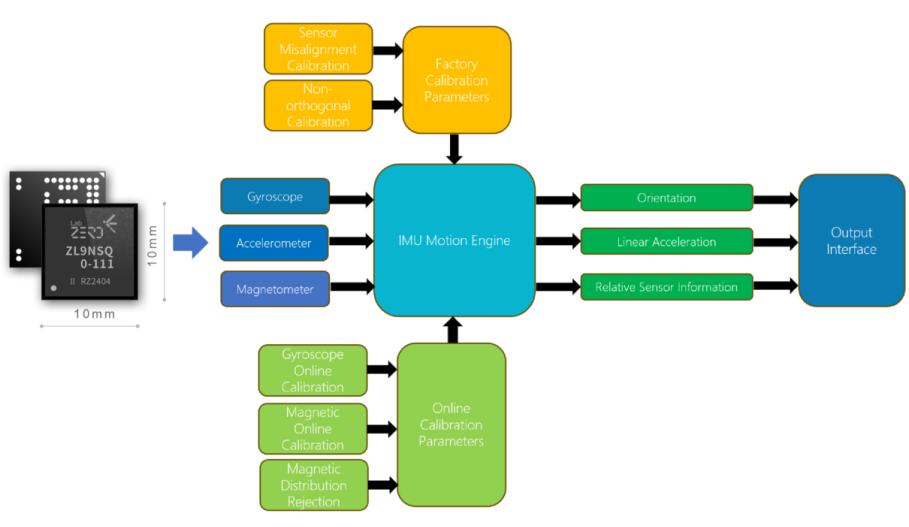 模块和芯片的功能连接图
模块和芯片的功能连接图
技术规格
- 工作电压:J1-USB Type-C(5V)、P2-PH2.0(3.3V)、P4-VCC(5V)
- 通讯方式:RF(蓝牙)、UART、SPI
- 俯仰/横渡精度(静态):0.05°
- 俯仰/横渡精度(动态):0.1°
- 航向精度误差(磁力计辅助):0.5°
- 相对航向误差(静态):<1°/hr
- 相对航向误差(动态):5°/hr
- 角度分辨率:<0.01°
- 角度重复性:<0.1°
- 传感器原始数据输出速率:Max250Hz
- 导航数据输出速率:Max250Hz
- 加速度计参数
- 量程:±16g
- 零偏稳定性:2mg
- 初始零值:40mg
- 比例因子误差:±0.06%
- 非线性:±0.1%
- 轴对齐误差:±0.05°
- 噪声密度:75ug/√Hz
- 带宽:260Hz
- 陀螺仪参数
- 量程:±2000°/s
- 零偏稳定性:5°/hr
- 初始零值:0.2°/s
- 比例因子误差:±0.05%
- 非线性:±0.1%
- 轴对齐误差:±0.05°
- 噪声密度:0.0028°/s/√Hz
- 带宽:256Hz
- 磁力计参数
- 量程:±4900uT
- 零偏稳定性:20nT
- 比例因子误差:±0.09%
- 非线性:±0.3%
- 轴对齐误差:±0.05°
- 噪声密度:0.14nT/√Hz
- 带宽:200Hz
配送清单
- ZL9NSQ 无线惯性单元IMU传感器模块 x1
- 2.54-10Pin排针 x2
documentstart
相关文档
documentsend










 全部商品分类﹀
全部商品分类﹀


 沪公网安备31011502402448
沪公网安备31011502402448
