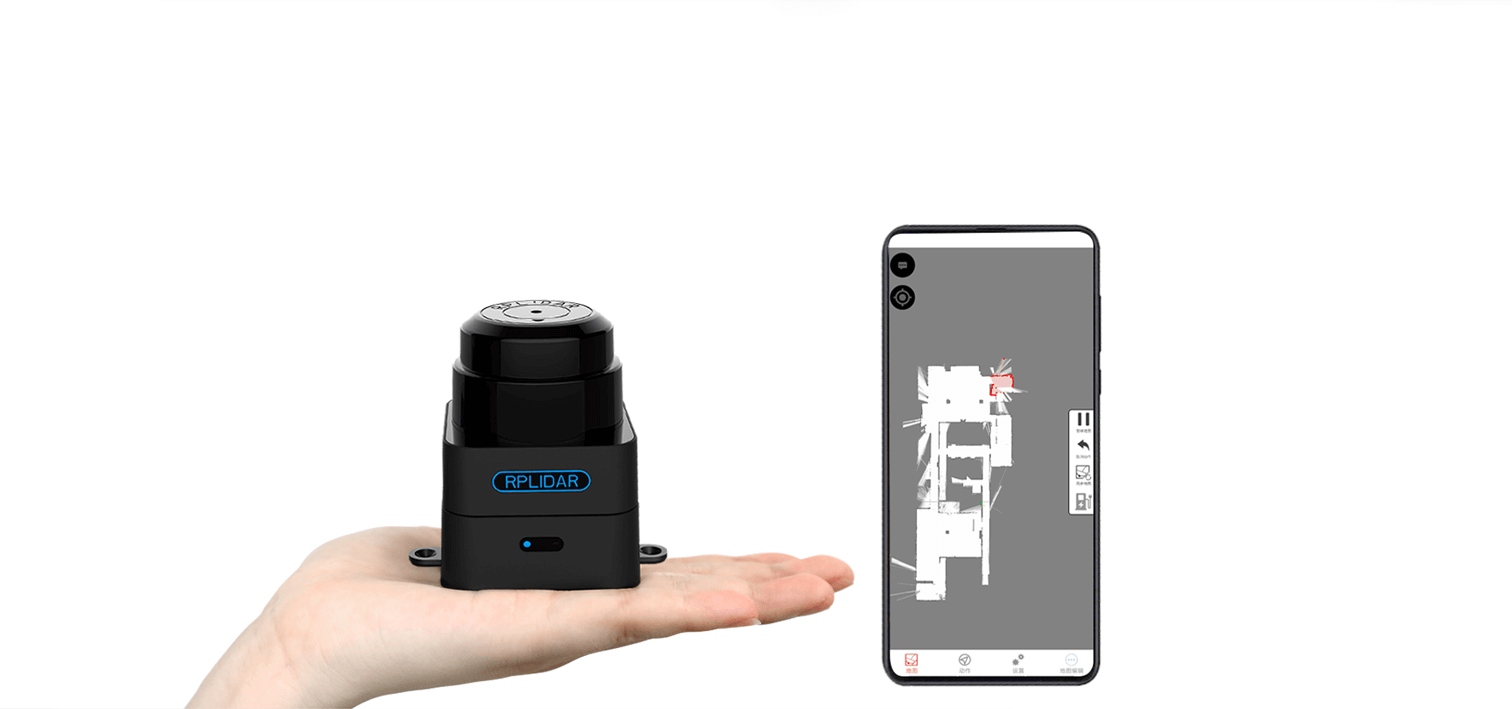
简介

Slamtec Mapper,一个集地图构建和实时定位为一体的全新激光雷达品类,其中包含了思岚第三代高性能SLAM引擎和激光雷达,无需任何外部依赖,上电即用。适用于机器人导航定位、环境测绘、手持测量等多个领域。
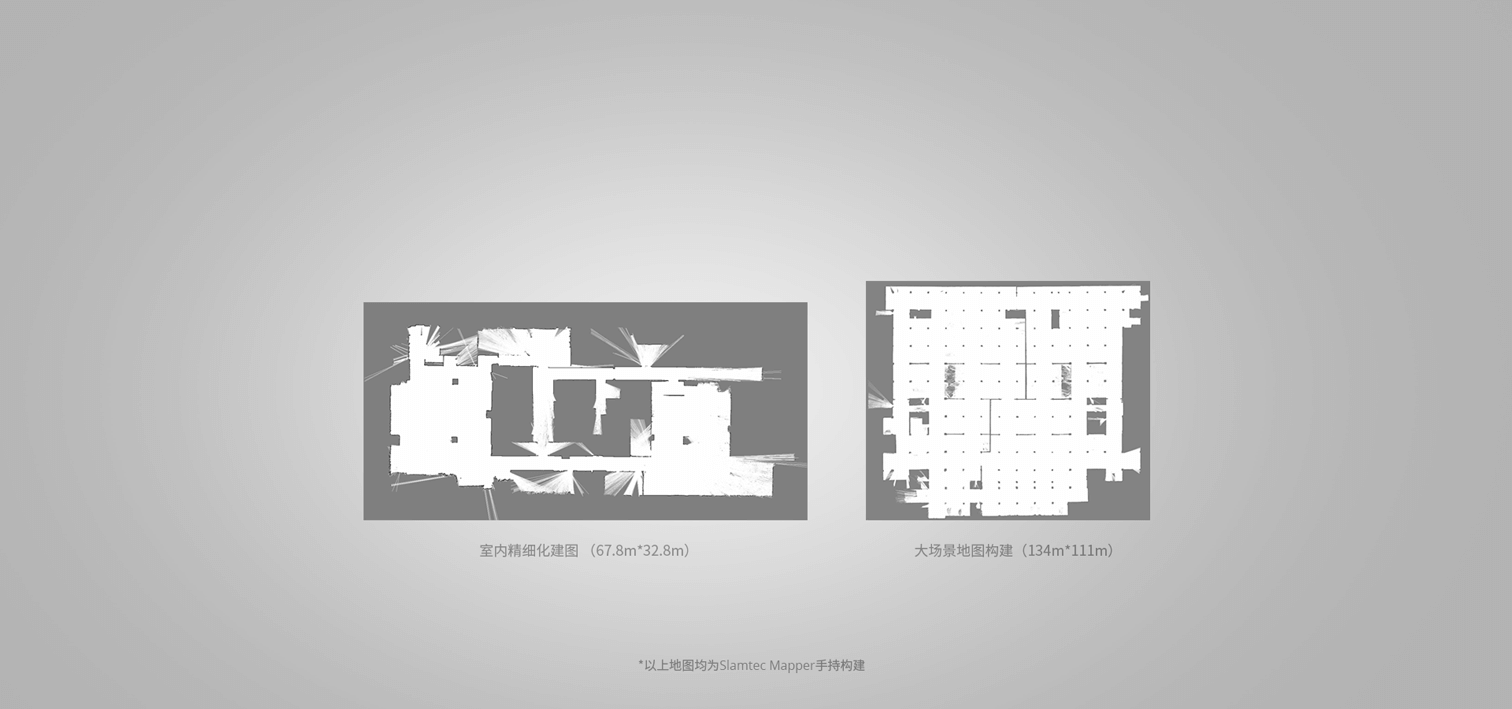
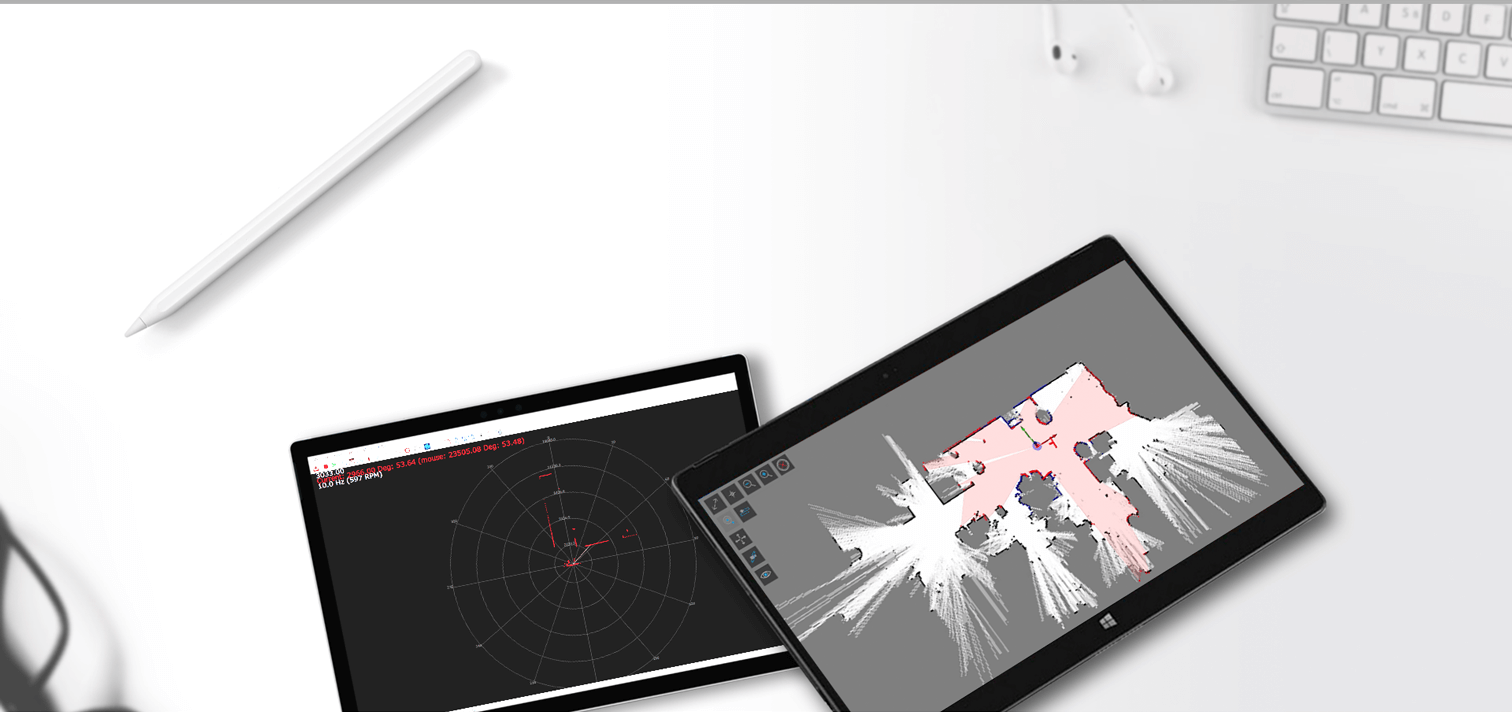
大场景、高品质建图
Slamtec Mapper采用思岚第三代高性能SLAM图优化引擎及SharpEdge™精细化建图技术,可实现高达十万平米的高精度地图构建和实时定位,并且主动探测闭环和修正地图。足以胜任各种复杂建图和定位应用场景,输出符合用户预期的地图和定位数据。
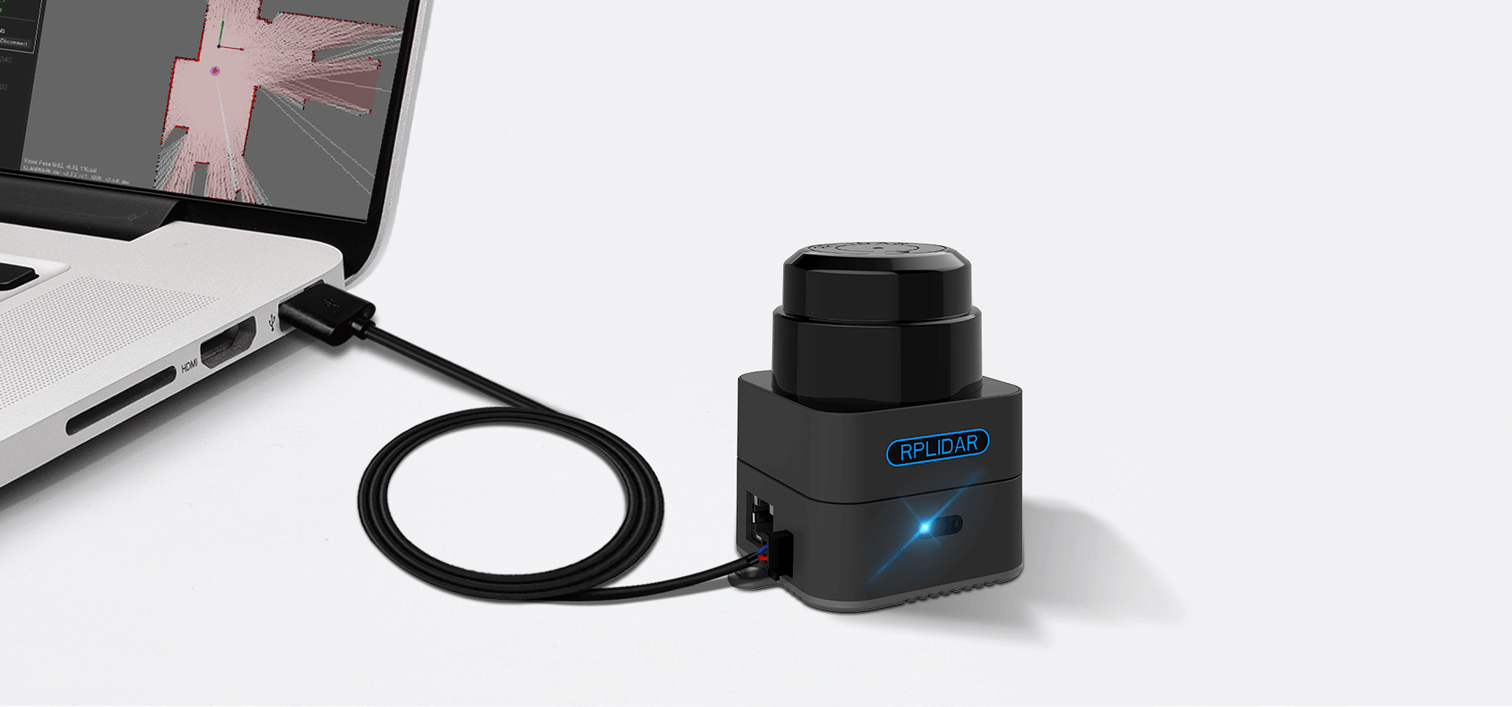
通电即用,完全无需外部依赖
Slamtec Mapper无需额外提供任何支持,只需一根USB供电线,上电即可开始工作。
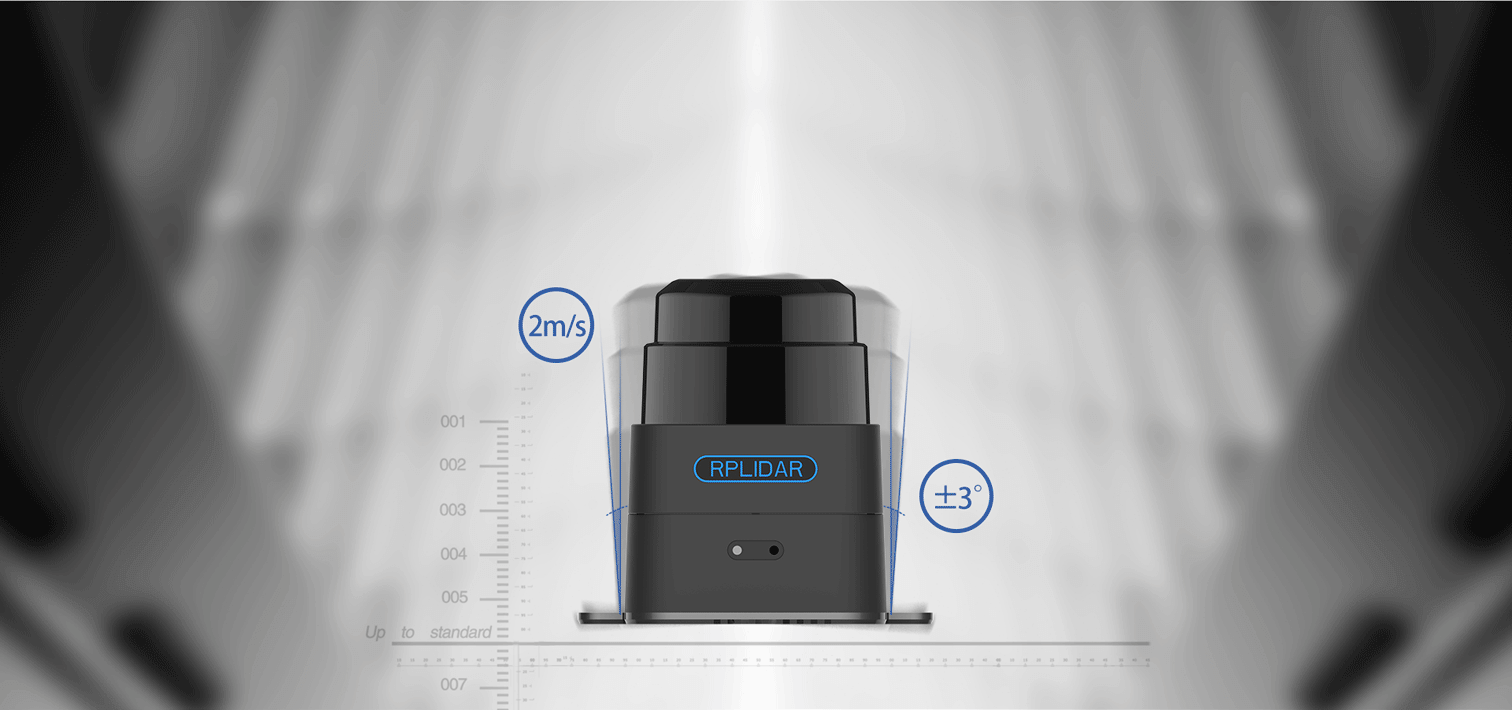
倾斜补偿、高速移动
Slamtec Mapper内置了9自由度惯性导航系统,可在高低起伏、存在倾角的手持建图模式下正常工作,保证最佳的建图数据质量。同时,能适应高速移动,最高支持2m/s的运动速度。
室内外均可工作
无论是室内复杂环境,还是室外强光直射环境,Slamtec Mapper出色的展现出其面对室内外复杂场景地图构建和定位的能力。
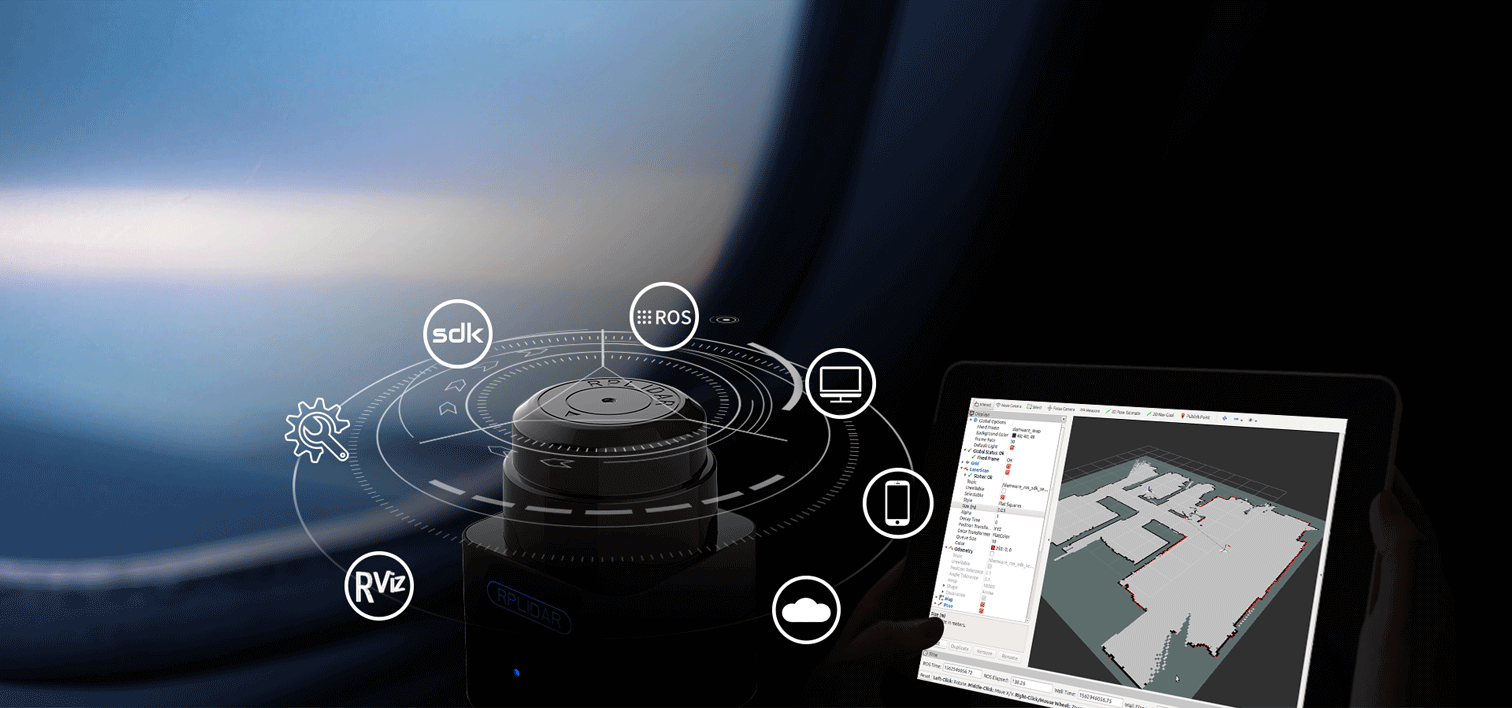
数据解析方便,ROS全兼容
Slamtec Mapper提供完善的跨平台SDK开发包、手机和PC端评估工具,方便用户进行评估、开发及使用。同时结合配套的ROS驱动,产生的地图和定位数据可无缝集成到ROS环境中。
是建图雷达,也是激光雷达
Slamtec Mapper除了自带建图和定位功能之外,本身也可作为激光雷达传感器直接进行
使用,通过SDK或ROS node,可快速将激光雷达数据接入用户既有系统中。
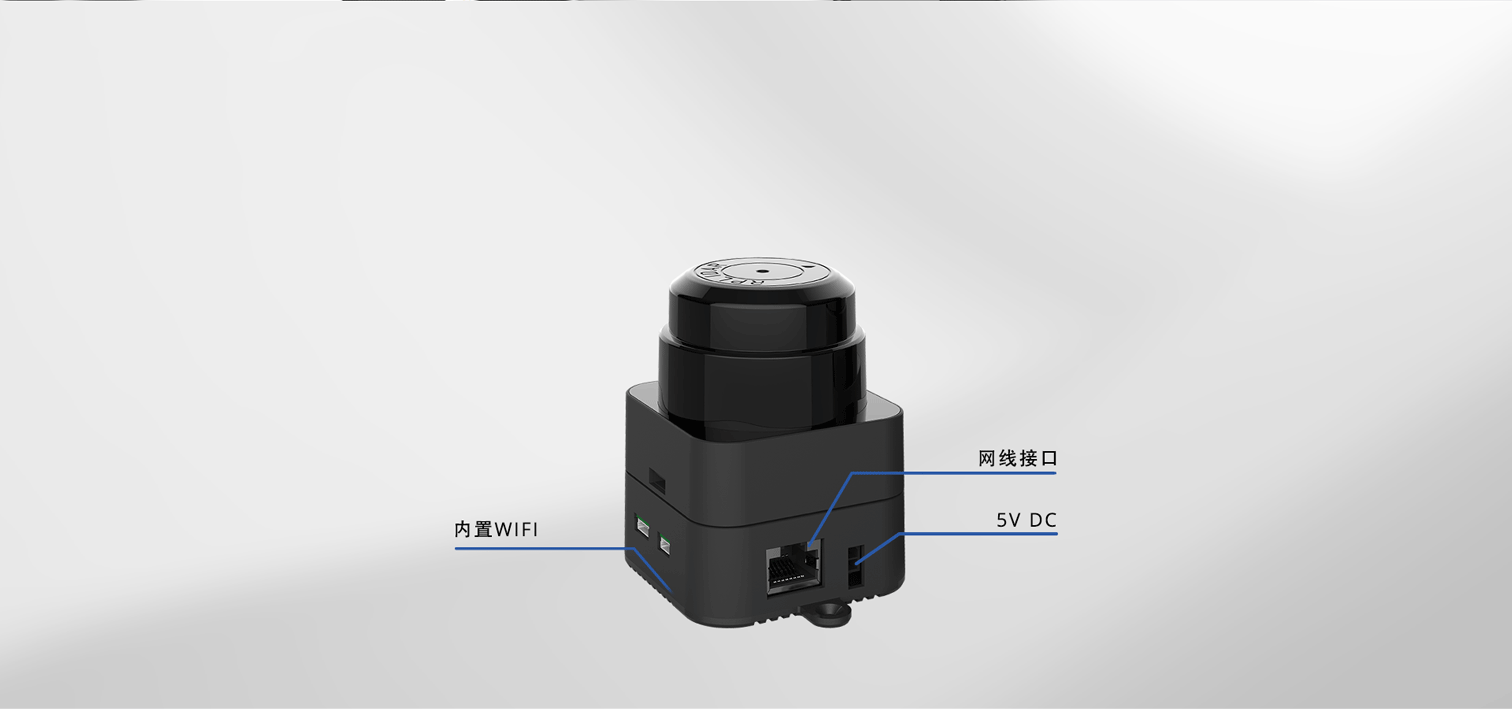
内置WIFI、以太网接口,通讯便捷
内置AP/Station双模式WiFi,和100M以太网接口。通过配套手机APP,即可实时获取Slamtec Mapper 产生的地图和定位数据。
参数
- 型号:M2M2
- 推荐应用:商用机器人环境测绘,手持测量室内外均可使用
- 测量半径:0.1m - 40m
- 采样频率:9.2K
- 扫描频率:8Hz-15Hz
- 角度分辨率:0.391°
- 电机:无刷
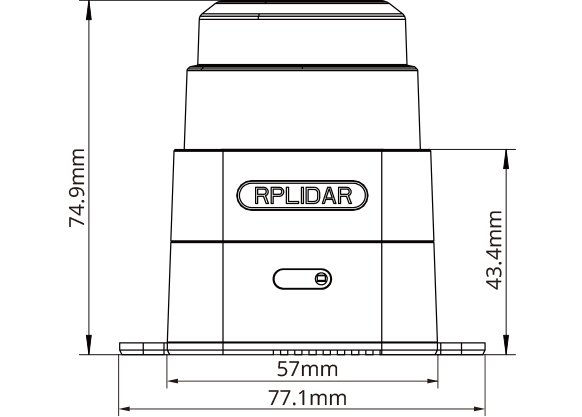
- 机械尺寸:77.1 x 57 x 74.9mm
- 重量:165g
- 供电电压:5V
- 供电电流:750mA - 1300mA
- 功耗:3.75W-6.5W
- 输出:以太网 (802.3/802.3u ) WiFi(802.11a/b/g/n/ac )
- 工作温度范围:-5℃-45℃
- 扫描范围:360°
- 测距分辨率:3cm(全部量程范围内)
- 测距精度:≤5cm (全部量程范围内)
- 最大移动速度:2m/s
- 数据刷新频率:10Hz
- 最大建图面积:300m x 300m
- 建图分辨率:0.05m
- 重复定位精度:< 0.02m
- 图优化工作时长:约1hr
- 最大倾斜角度:±3°
配送清单
- SLAMTEC MAPPER M2M2-360°激光建图传感器 x1
documentstart
相关文档
 全部商品分类﹀
全部商品分类﹀













 沪公网安备31011502402448
沪公网安备31011502402448