简介
C4001(12m)毫米波存在传感器采用24GHz的波长信号,拥有水平100°的检测范围,8米的存在检测范围和12米的运动检测范围和测距范围。
人体检测
相较于其他类型的人体存在传感器,如红外传感器,C4001(12m)毫米波存在传感器具有动静都能检测的特点,并且其抗干扰能力相对较强,不易受到温度变化、环境光变化和环境噪声等因素的影响。不论人体是静坐、睡觉还是运动,传感器都能够快速、灵敏地检测到其存在。
| | 毫米波存在传感器 | 红外传感器 |
| 感应原理 | TOF雷达原理+多普勒雷达感应原理 (主动探测) | 热释电红外感应原理 (被动辐射) |
| 动作感应灵敏度 | 可检测到人体的存在、微动、运动 | 只可检测到人体的运动和近距离微动 |
| 感应距离 | 可设置不同的感应距离 | 不能设置感应范围 |
| 环境温度影响 | 不受环境温度影响 | 温度升高到接近人体时灵敏度低 |
| 应用环境 | 不受热源、光源、气流干扰 | 易受热源、气流干扰 |
| 穿透能力 | 可穿透布料、塑料、玻璃等绝缘材料 | 只可穿透部分透明塑料 |
| 是否支持测距 | 是 | 否 |
距离和速度检测
C4001(12m)毫米波存在传感器采用FMCW调制进行测距与测速,最远测距范围达到12M测速范围为0.1 ~10m/s。
FMCW一种基于频率调制连续波的雷达系统。与传统的脉冲雷达不同,FMCW雷达通过连续地发射一系列频率逐渐变化的连续波信号,并同时接收反射回来的信号。通过分析接收到的信号,可以实现距离、速度和角度等参数的测量。
与传统脉冲雷达技术相比FMCW雷达可以连续的测量物体的距离,通过多普勒效应可以获取目标物体的速度信息,适用于需要获取目标物体运动状态的应用 。此外FMCW雷达可以实现连续的频率扫描,提供较高的测量分辨率,不需要等待回波信号的返回,适用于需要实时监测和跟踪目标物体的应用。
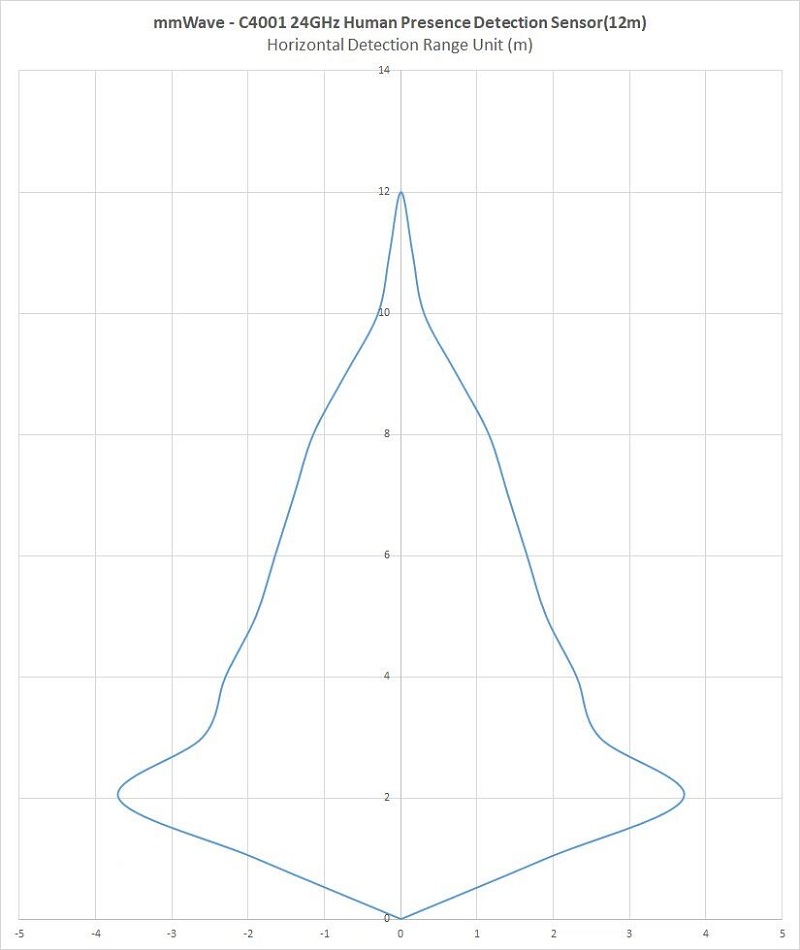 毫米波人体传感器的检测范围
毫米波人体传感器的检测范围什么是毫米波雷达传感器?
毫米波雷达技术是一种非接触式传感技术,用于探测物体并提供这些物体(在我们的例子中是人类)的距离、速度和角度。毫米波传感器发射的信号的波长在24GHz和300GHz之间的高频频谱中,也称为毫米(mm)范围。
特征
- 通讯方式:采用I2C和UART两种通讯方式
- 接口方式:Gravity接口(PH2.0)
- 人体检测:0m~ 8m存在检测,0m~ 12m运动检
- 距离检测:1.2m~12m
- 速度检测:0.1m/s~ 10m/s
- 抗干扰能力强,不受积雪、雾霾、温度、湿度、灰尘、光线、噪音等影响。
- 尺寸小,易于集成
技术规格
- 工作电压:3.3V/5V
- 最远探测距离:12m
- 波束角度:100*80°
- 调制模式:FMCW
- 工作频率:24GHz
- 工作温度:-40~85℃
- 波特率:9600
- I2C地址:0x2A/0x2B
- 尺寸:22*30mm
配送清单
- Gravity:C4001毫米波存在传感器(12m) – I2C & UART ×1
- Gravity-4P I2C/UART传感器连接线 x1
documentstart
相关文档
产品维库
documentsend
 全部商品分类﹀
全部商品分类﹀













 沪公网安备31011502402448
沪公网安备31011502402448